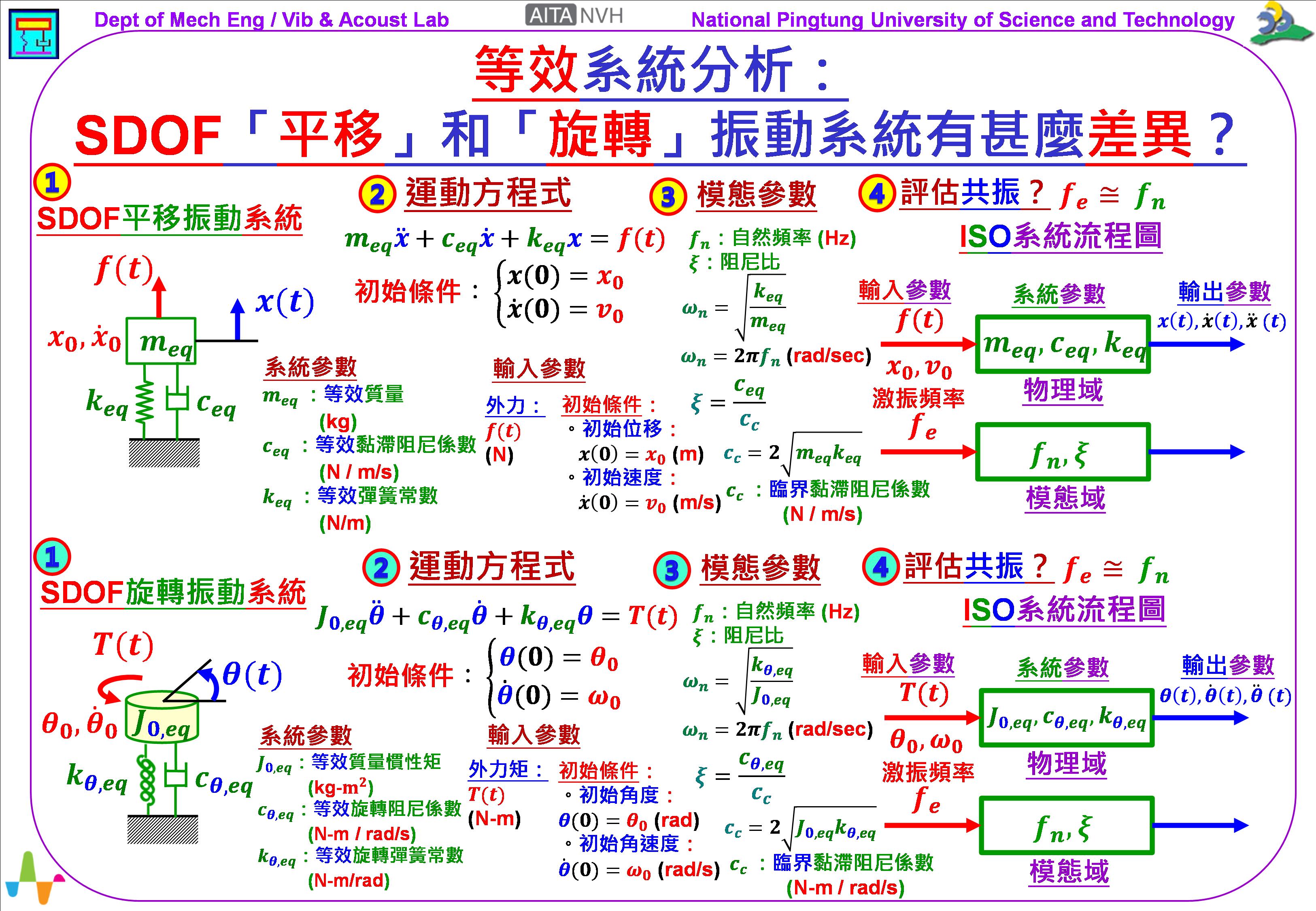
這個單元要來探討的主題是:「等效系統分析」(Equivalent System Analysis),針對SDOF單自由度的「平移」(translational)和「旋轉」(rotational)振動系統,探討兩者之間有甚麼差異?
關於SDOF「平移」(translational)振動系統,參閱圖片上方的系列圖示,說明如下:
1. 當取得了SDOF單自由度系統的「等效系統」(Equivalent System):可取得System 系統參數:就是𝒎𝒆𝒒、𝒄𝒆𝒒、𝒌𝒆𝒒,分別是「等效質量」(kg)、「等效黏滯阻尼係數」(N / m/s)、「等效彈簧常數」(N / m)。
2. 推導得到系統的運動方程式(Equation of Motion, EOM):除了System 系統參數以及Output 輸出參數,位移𝒙(𝒕)/速度𝒙 ̇(𝒕)/加速度𝒙 ̈(𝒕),還包括:Input 輸入參數:外力 𝒇(𝒕) (N),和兩個初始條件(IC),初始位移:𝒙𝟎 (m),和初始速度:𝒗𝟎 (m/s)。
3. 進而可以進行「模態分析」(modal analysis):可以得到「模態參數」(modal parameter):「自然頻率」(natural frequency) 𝒇𝒏 (Hz)以及「阻尼比」(damping ratio) 𝝃。
4. 評估「共振」(resonance):即可據以評估結構系統是否有「共振」,也就是在比較探討外力 𝒇𝒆「激振頻率」(excitation frequency)和系統的𝒇𝒏「自然頻率」。如果,𝒇𝒆
≅ 𝒇𝒏,就會「共振」,反之,就沒有「共振」。
另外,觀察圖示的「ISO系統流程圖」(system block diagram),說明如下:
1. Input 輸入參數:就是外力 𝒇(𝒕),和兩個初始條件(IC),𝒙𝟎和𝒗𝟎。
2. System 系統參數:就是𝒎𝒆𝒒、𝒄𝒆𝒒、𝒌𝒆𝒒。
3. Output 輸出參數:如系統位移𝒙(𝒕)/速度𝒙 ̇(𝒕)/加速度𝒙 ̈ (𝒕)之時間域響應。
由於以上的各種參數,都是物理量(physical quantity):可以實際度量、具有物理單位(physical unit),所以此「ISO系統流程圖」稱為:「物理域系統方塊圖」(physical
domain block diagram)。
參閱「模態域系統方塊圖」(modal domain block diagram),其中,System 系統參數包括:𝒇𝒏「自然頻率」 以及𝝃「阻尼比」。與外力的 𝒇𝒆「激振頻率」比較,就可以判斷是否有「共振」。建議:採用20%原則,也就是:𝒇𝒆 < 𝟎.𝟖 𝒇𝒏,或 𝒇𝒆 > 𝟏.𝟐 𝒇𝒏,以避免「共振」。
本單元主要在瞭解SDOF單自由度的「平移」(translational)和「旋轉」(rotational)振動系統,探討兩者之間有甚麼差異?
接著,參閱圖片下方的系列圖示,關於SDOF「旋轉」(rotational)振動系統,說明如下:
1. 當取得了SDOF單自由度系統的「等效系統」(Equivalent System):可取得System 系統參數:就是𝑱𝟎,𝒆𝒒、𝒄𝜽,𝒆𝒒、𝒌𝜽,𝒆𝒒,分別是「等效質量慣性矩」(kg-𝐦^𝟐)、「等效旋轉阻尼係數」(N-m / rad/s)、「等效旋轉彈簧常數」(N-m/rad)。
2. 推導得到系統的運動方程式(Equation of Motion, EOM):除了System 系統參數以及Output 輸出參數,角度𝜽(𝒕)/角速度𝜽 ̇(𝒕)/角加速度𝜽 ̈(𝒕),還包括:Input 輸入參數:外力矩 𝑻(𝒕) (N-m),和兩個初始條件(IC),初始角度:𝜽𝟎 (rad),和初始角速度:𝝎𝟎 (rad/s)。
3. 進而可以進行「模態分析」(modal analysis):可以得到「模態參數」(modal parameter):「自然頻率」(natural frequency) 𝒇𝒏 (Hz)以及「阻尼比」(damping ratio) 𝝃。
4. 評估「共振」(resonance):即可據以評估結構系統是否有「共振」,也就是在比較探討外力 𝒇𝒆「激振頻率」(excitation frequency)和系統的𝒇𝒏「自然頻率」。如果,𝒇𝒆
≅ 𝒇𝒏,就會「共振」,反之,就沒有「共振」。
另外,觀察圖示的「ISO系統流程圖」(system block diagram),說明如下:
1. Input 輸入參數:就是外力矩 𝑻(𝒕),和兩個初始條件(IC),𝜽𝟎 和 𝝎𝟎。
2. System 系統參數:就是𝑱𝟎,𝒆𝒒、𝒄𝜽,𝒆𝒒、𝒌𝜽,𝒆𝒒。
3. Output 輸出參數:如系統的角度𝜽(𝒕)/角速度𝜽 ̇(𝒕)/角加速度𝜽 ̈(𝒕)之時間域響應。
由於以上的各種參數,都是物理量(physical quantity):可以實際度量、具有物理單位(physical unit),所以此「ISO系統流程圖」稱為:「物理域系統方塊圖」(physical
domain block diagram)。
參閱「模態域系統方塊圖」(modal domain block diagram),其中,System 系統參數包括:𝒇𝒏「自然頻率」 以及𝝃「阻尼比」。與外力的 𝒇𝒆「激振頻率」比較,就可以判斷是否有「共振」。
綜合一下這個單元的討論,分別觀察了SDOF單自由度的「平移」(translational)和「旋轉」(rotational)振動系統,兩者之間的差異,彙整如下:
Ø
振動方向:「平移」(translational)振動
→「旋轉」(rotational)振動。
Ø
自由度的定義:位移
𝒙(𝒕) (m) → 角度 𝜽(𝒕) (rad)。
Ø
自由度的定義:速度
𝒙 ̇(𝒕) (m/s) → 角速度 𝜽 ̇(𝒕) (rad/s)。
Ø
自由度的定義:加速度
𝒙 ̈ (𝒕) (m/s^𝟐) → 角加速度 𝜽 ̈(𝒕) (rad/s^𝟐)。
Ø
系統參數:「等效質量」𝒎𝒆𝒒
(kg) → 「等效質量慣性矩」𝑱𝟎,𝒆𝒒 (kg-𝐦^𝟐)。
Ø
系統參數:「等效阻尼係數」𝒄𝒆𝒒
(N / m/s) → 「等效旋轉阻尼係數」𝒄𝜽,𝒆𝒒 (N-m / rad/s)。
Ø
系統參數:「等效彈簧常數」𝒌𝒆𝒒
(N / m) → 「等效旋轉彈簧常數」𝒌𝜽,𝒆𝒒 (N-m/rad)。
Ø
輸入:外力 𝒇(𝒕) (N) → 外力矩 𝑻(𝒕) (N-m)。
Ø
初始條件:初始位移:𝒙𝟎 (m) → 初始角度:𝜽𝟎 (rad)。
Ø
初始條件:初始速度:𝒗𝟎 (m/s) → 初始角速度:𝝎𝟎 (rad/s)。
Ø
自然頻率:𝝎𝒏=√(𝒌𝒆𝒒/𝒎𝒆𝒒 ) (rad/s) → 𝝎𝒏=√(𝒌𝜽,𝒆𝒒
/ 𝑱𝟎,𝒆𝒒 ) (rad/s)。
𝒇𝒏 = 𝝎𝒏 / 𝟐𝝅 (Hz)。
Ø
阻尼比:𝝃 = 𝒄𝒆𝒒
/ 𝒄𝒄 → 𝝃
= 𝒄𝜽,𝒆𝒒 /𝒄𝒄。
Ø
臨界阻尼係數:𝒄𝒄=𝟐√(𝒎𝒆𝒒 𝒌𝒆𝒒) → 𝒄𝒄=𝟐√(𝑱𝟎,𝒆𝒒 𝒌𝜽,𝒆𝒒)。
以上個人看法,請多指教!
王栢村
2023.07.06